Autonomous Ground Vehicle (Priye)
Purpose
As part of the requirements for graduation from the Electrical and Electronics Department of Niger Delta University, the Autonomous Ground Vehicle (AGV) was designed and built by a Team of Three - Bomanaziba Ogoni, Henry Ejemuta and Emmanuel Evuazeze my humble self.
Design and Implementation
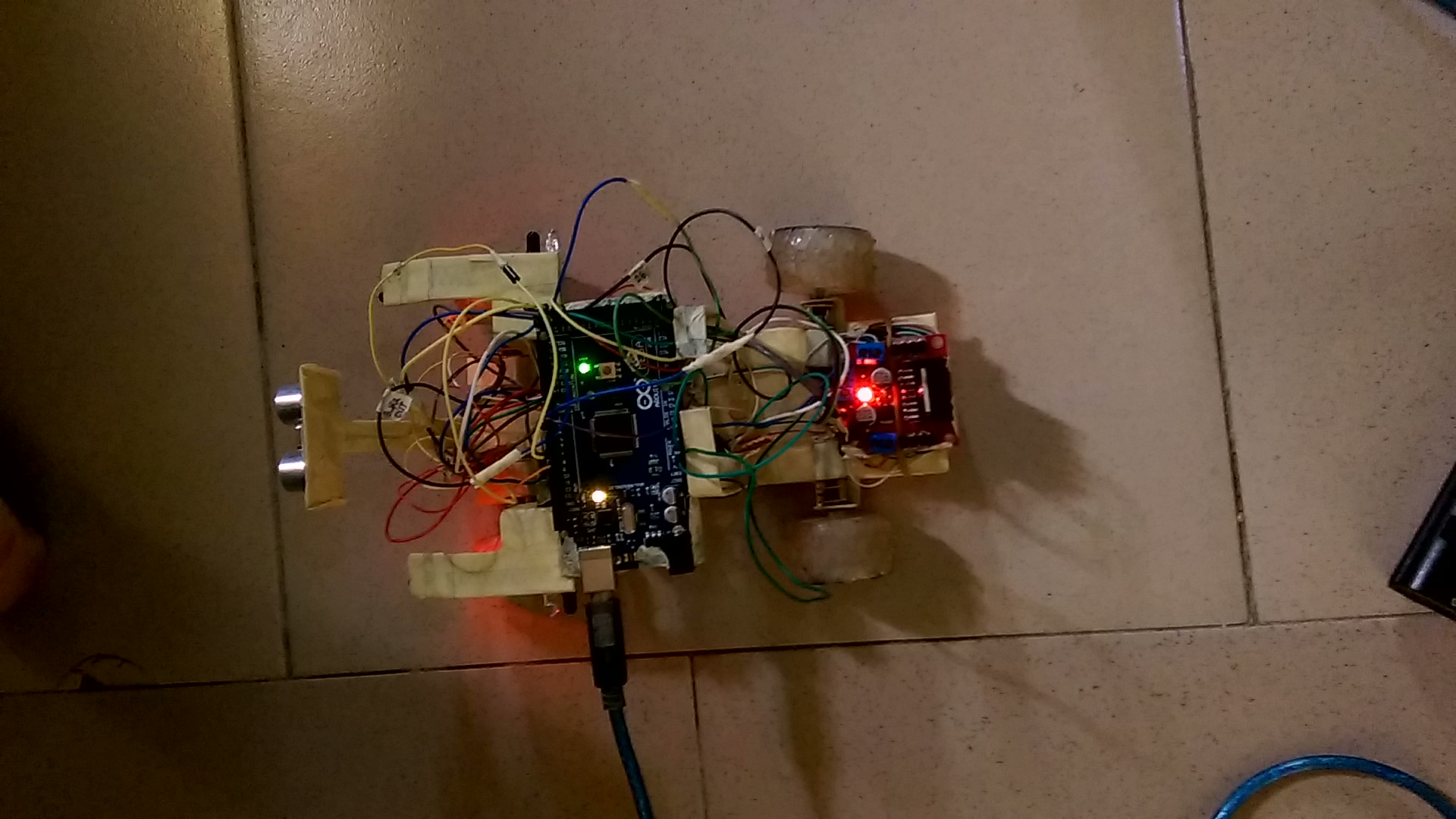
This project presents the design, implementation as well as the testing of an Autonomous Ground Vehicle (AGV). The Design and Implementation was in two phase, which are; Obstacle Detection and Avoidance, and Edge Detection and Avoidance.
The Implementation of Obstacle Detection and Avoidance was done using an Ultrasonic Sensor and Infrared Proximity Sensors, while the Edge Detection and Avoidance was implemented using only Infrared proximity sensors.
The Obstacle Detection and Avoidance is in four (4) direction – i.e. the front, left, right, and back. The front detects obstacles within the range of 2cm to 400cm using an Ultrasonic sensor, while the left, right, and back uses Infrared proximity sensor for the obstacle detection within 1cm to 10cm.The Edge Detection and Avoidance was only implemented at the front of the AGV using infrared proximity sensor positioned at an angle of approximately 45 degrees.
Full design and implementation as well as testing was done in course of this project with satisfactory result obtained for both Edge and Obstacle Detection and avoidance.